Error processing SSI file
|
Remotely Operated Vehicles
What is an ROV?
A remotely operated vehicle (ROV) is an underwater robot controlled from the surface by a tether that provides power and control instructions down to the vehicle while returning video and other data from the vehicle. The ROV pilot "flies" the vehicle via a joy stick that sends instructions down to thrusters mounted on the vehicle that provide horizontal, vertical and lateral movement. The connection via tether also allows for real-time imaging of the sea floor, control of sampling systems and decision-making by a team of technicians and scientists working together. The data and video that are sent up the cable are recorded topside on the ship. One of the most visible components of an ROV is its syntactic foam pack that provides positive buoyancy to offset the weight of the vehicle's thruster motors, cameras, lights and other components. The syntactic foam is composed of small hollow glass spheres in an incompressible resin matrix that provides buoyancy at depth.
The Kraken2 (K2) Remotely Operated Vehicle
The Kraken2 (K2) remotely operated vehicle (ROV) is a "science class" vehicle named after a sea monster from Norse mythology. The term "science class" refers to the fact that the K2 is one of a handful of ROV's that have been developed specifically for scientific sampling from the ground up, as opposed to modifying a commercial off the shelf vehicle to conduct scientific research. The advantages of a purpose-built science class ROV is that the system allows for mounting, powering and controlling a wide range of specialized research gear. Because of the real-time connection to the K2, scientists can determine when to take digital still images, can have the ROV pilot maneuver the vehicle precisely for detailed, up-close video of deep sea corals and can direct the technicians to collect samples using the ROV's manipulator or suction sampler. For the west coast deep sea coral cruise small pieces of corals will be collected for genetic analyses and placed either in one of eight 4 liter clear buckets arranged on a "lazy susan" that can be rotated by the technician to provide discrete samples. A small video camera provides a real-time view of the contents of the buckets as they rotate into view, which provides a visual record of the samples as they are taken. The K2 also has a "biobox", a larger rectangular container that is constructed of thick plastic that provides substantial insulation. When the K2 reaches the bottom the biobox is extended via a hydraulic ram and the warm surface water is exchanged with the colder bottom water. In this fashion any samples taken at depth will be maintained at their ambient, colder temperature when the ROV is recovered from the warmer surface waters. The ROV's position and depth is simultaneously logged as samples are taken to provide important information for the scientists.
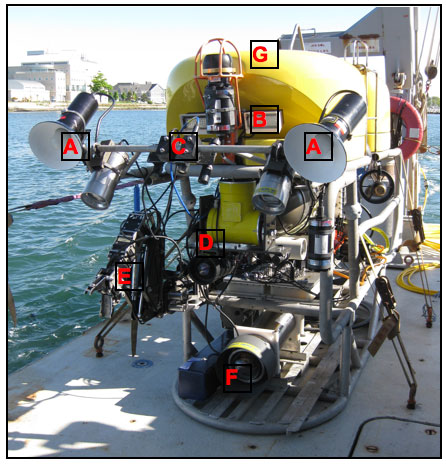 |
| Front view of the K2 illustrating some of the imaging, lighting and sampling systems that will be used to characterize deep sea coral habitats. A) 200 watt HMI lights
B) LED lights
C) Standard definition camera with parallel laser beams for size scale
D) Digital still camera
E) 6 function hydraulic manipulator
F) Hi-Definition video camera
G) Sector scanning sonar
|
For the west coast deep sea coral mission the K2 is configured with four standard definition (SD) video cameras and one high definition (HD) camera. The four SD cameras provide two forward looking views, one mounted on a high bar on the front of the vehicle, the other lower down and mounted on a pan and tilt unit, one looking down into the biobox when it is extended, and one looking into the clear sample buckets. The HD video camera is also mounted on the pan and tilt unit as is a digital still camera that has two strobes mounted on the high bar. Since the deep sea is in perpetual darkness, illumination is critical for high quality imagery and the K2 carries two HMI (hydrargyrum medium-arc iodide) lights, two LED lights and two quartz halogen lights, all of which can be turned on or off to meet the imaging needs.
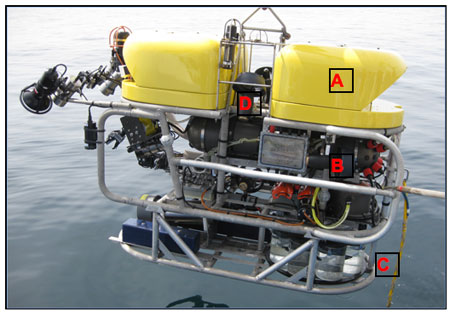 |
| Side view of the K2. A) Syntactic foam
B) Main electronics bottle
C) Clear sample buckets
D) Vertical thrusters
|
|