As technology constantly changes, so does our capability to explore the ocean. Just within the last 50 years, technology has given scientists the ability to conduct scientific studies in areas that were previously unattainable. Today researchers are also able to observe the ocean environment and all that lies within in noninvasive ways, so as to better protect its fragile inhabitants. Many different technologies will be used during this expedition. This section highlights a few of the technologies that will be used on this expedition and offers links to learn more about each.
Remotely Operated Vehicles (ROV)
The NURC UNC-W Phantom S2 ROV ready for deployment. (Photo: NOAA)
Remotely operated underwater vehicles (ROVs) are unoccupied, highly maneuverable underwater robots operated by a person aboard a surface vessel. They are linked to the ship by a group of cables that carry electrical signals back and forth between the operator and the vehicle. Most are equipped with at least a video camera and lights. Additional equipment is commonly added to expand the vehicle's capabilities. These may include a still camera, a manipulator or cutting arm, water samplers, and instruments that measure water clarity, light penetration, and temperature. First developed for industrial purposes, such as internal and external inspections of pipelines and the structural testing of offshore platforms, ROVs are now used for many applications, many of them scientific. They have proven extremely valuable in ocean exploration, and are also used for educational programs at aquaria and to link to scientific expeditions live via the Internet.
Chief Scientist, Joe Hoyt, unlocks the mysteries of the deep. (Photo: NOAA)
How long can you hold your breath underwater? For a minute, maybe two? What do you see when you open your eyes underwater? What can you hear? How fast can you swim? When we venture into the water, none of our senses seem to work very well. We certainly can't see or hear clearly, it's impossible to breathe, and as anyone knows who has been in the water too long, we get cold and may turn blue. Unaided by technology, people are about as helpless underwater as, well, a fish on grass.
Due to these limits of our physiology, most of the oceanic world has remained unexplored. To our fragile bodies, the underwater realm is as alien and hostile as outer space. Despite these difficulties, the human spirit of exploration has driven us to figure out how to get into the water, observe its unknown expanses, and uncover the mysteries of the deep.
Although technological advances keep making it possible to dive deeper, severe restrictions remain on the depth and length of time that divers can spend underwater. Research in undersea ecosystems often requires diving to depths beyond 40 m (141 ft) -- depths that exceed the limits of conventional scuba equipment. Divers can extend their bottom time by breathing nitrox, a mixture of oxygen enriched air, but are still limited by weather, gas supply in their tanks, and the risk of decompression sickness commonly known as "the bends."
Scuba Diving
David Ball surveying the U-701 off the coast of North Carolina in July 2008.
The self-contained underwater breathing apparatus or scuba diving system, as we know it today, is the result of technological developments and innovations that began almost 300 years ago. Scuba diving is the most extensively used system for breathing underwater by recreational divers throughout the world, and in various forms is also widely used to perform underwater work for military, scientific and commercial purposes.
Click here to learn more about scuba diving and how divers work underwater.
Multibeam Sonar
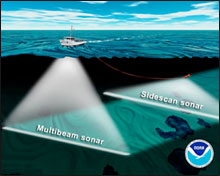
Illustration of a ship using hull-mounted multibeam sonar while towing a side-scan sonar on a cable. Both sonars map the sea floor in a swath below the ship as it drives forward.
Multibeam sonar works by simultaneously sending out multiple sonar beams in a fan-shaped pattern that is oriented perpendicular to the ship's track. In this way, it maps the sea floor directly below the ship, as well as an area extending outward to either side of the ship. Mapping in this way is often referred to as "mowing the lawn" because each pass covers a fixed width of the sea floor and a regular pattern of tracklines is necessary to cover larger areas. Computers on the ship collect all of this sonar data and then process it to make two- or three-dimensional maps that help visualize the shape of the sea floor.
Side-scan Sonar
Side-scan sonar is different in that it gives information about the character of the sea floor rather than just its depth. Side-scan sonars send out sound to either side of the ship's track, and then listen for the echoes that are reflected back. How much sound is reflected back (the "acoustic reflectivity") depends upon the composition, roughness, and slope of the sea floor. This reflectivity information is usually displayed in a black-and- white map, with black representing areas of high reflectivity and white representing areas of low reflectivity. Lava flows, for example, usually show up as dark lobes in side-scan maps, because they are rough and solid and provide a good surface for reflecting sound. In contrast, sandy areas appear relatively light in side-scan maps because the sediments absorb sound instead of reflecting it. Side-scan data also provides information about sea-floor structures because features like fault scarps reflect a lot of sound if they are facing toward the ship, or they cast acoustic shadows if they are facing away from it.
Click here for more information about mulitbeam and side scan sonar.