Sidescan Sonar
 The expedition team will employ a Marine Sonic Sea Scan sonar system. This system has a 600 kHz single frequency towfish, 100 meters of tow cable, waterproof computer for viewing and storing acoustic images, and a self contained DGPS unit to accurately record potential target locations.
The expedition team will employ a Marine Sonic Sea Scan sonar system. This system has a 600 kHz single frequency towfish, 100 meters of tow cable, waterproof computer for viewing and storing acoustic images, and a self contained DGPS unit to accurately record potential target locations.
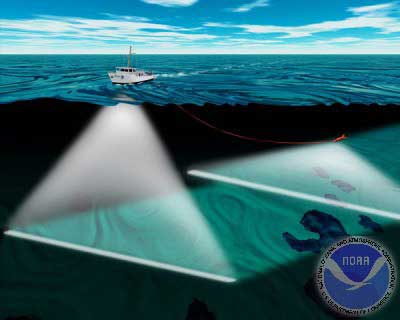
Sonar (SOund NAvigation and Ranging) is a simple way to detect wrecks. It uses sound pulses/echoes, it is inexpensive and can be fitted in small boats. Modern systems can be combined with a global position system, or GPS. Some sonars can detect objects below the seafloor.
Sidescan sonar was developed by Professor Harold Edgerton and others in the 1960s. It is a sonar device that can look sideways. This can be compared with radar, but uses sound echoes instead of electromagnetic pulses. The sound pulses are usually on frequencies between 100 and 500 KHz. A higher frequency gives better resolution but less range. The sound pulses are most commonly transmitted from a “towfish,” but there are also hull-mounted versions. The pulses are sent in a wide angular pattern down to the bottom, and the echoes are received back in fractions of a second. Thus each pulse lets us “see” a narrow strip below and to the sides. As the fish advances, an image is displayed on a monitor.
Magnetometer
 In addition to a side scan sonar system, the 2004 search team will use a Geometric G-880 cesium magnetometer. A magnetometer is a passive device that can detect concentrations of ferrous material, such as iron anchors, cannon, or ships’ fittings, all of which produce a variation, or anomaly, in the earth’s magnetic field. This makes magnetometers a highly useful tool for shipwreck hunts and studies. However, a magnetometer must be towed relatively close to the object to detect it. As a rough guide, a large steel wreck can be detected at a range of 120 to 180 meters; a site with iron anchors and cannon at 80 to 100 meters; and an isolated cannon at 30 meters.
In addition to a side scan sonar system, the 2004 search team will use a Geometric G-880 cesium magnetometer. A magnetometer is a passive device that can detect concentrations of ferrous material, such as iron anchors, cannon, or ships’ fittings, all of which produce a variation, or anomaly, in the earth’s magnetic field. This makes magnetometers a highly useful tool for shipwreck hunts and studies. However, a magnetometer must be towed relatively close to the object to detect it. As a rough guide, a large steel wreck can be detected at a range of 120 to 180 meters; a site with iron anchors and cannon at 80 to 100 meters; and an isolated cannon at 30 meters.
Remotely Operated Vehicle
 To get a closer look at, or “ground-truth,” anomalies identified through either the side scan sonar or the magnetometer, the 2004 Hunt for the Alligator expedition team will use a remotely-operated vehicle (ROV). An ROV is a vehicle or platform that is placed in the water and controlled from the ship. ROVs can be fitted to include sample collectors, manipulator arms, video and still cameras and lights. ROVs are generally powered by thrusters, providing directional control. For the 2004 search, the team will use a Nova Ray ROV, which can either be towed or use its own propulsion system. The Nova Ray is equipped with a duel-frequency side-scan sonar, video camera and lights and a manipulator arm for grasping small objects.
To get a closer look at, or “ground-truth,” anomalies identified through either the side scan sonar or the magnetometer, the 2004 Hunt for the Alligator expedition team will use a remotely-operated vehicle (ROV). An ROV is a vehicle or platform that is placed in the water and controlled from the ship. ROVs can be fitted to include sample collectors, manipulator arms, video and still cameras and lights. ROVs are generally powered by thrusters, providing directional control. For the 2004 search, the team will use a Nova Ray ROV, which can either be towed or use its own propulsion system. The Nova Ray is equipped with a duel-frequency side-scan sonar, video camera and lights and a manipulator arm for grasping small objects.
For more see:
Sound Science: Underwater Search Technologies