Error processing SSI file
|
Multibeam Mapping
Maps are an important tool that people use to find their way around and to familiarize themselves with their surroundings. Scientists map the sea floor for a similar reason; to know what can be found on the sea floor. For example, fishermen know that fish prefer to aggregate around an outcropping, reef, sunken boat, or any hard substrate on the sea floor. Sea floor maps can help boaters located these types of habitat.
The seafloor of Gray’s Reef National Marine Sanctuary was mapped in 2001 using both multibeam and side scanning sonar. Using information from this data, scientists produced a habitat map of the sanctuary’s seafloor which is characterized into four categories: densely colonized livebottom, sparsely colonized livebottom, rippled sand and flat sand. The densely colonized ledges and outcroppings comprise only about one percent of all available habitat where fish are known to aggregate.
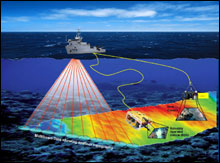 |
| Illustration of multibeam sonar and various bottom type identification camera systems. Click here for a larger image.
|
During this cruise, one goal is to map areas adjacent to the sanctuary to determine how the habitats outside the sanctuary compare to those within it. During this two week mission, mapping efforts will focus on the area to the north and to the east of the sanctuary. Mapping of the seafloor will be conducted using a multibeam sonar system. This system consists of a transducer and a receiver mounted on the bottom of the ship. As the ship follows a planned straight line over the area to be mapped, the transducers sends multiple sound pulses to the sea floor. These pulses are sent in many directions at one time. When the pulses hit the sea floor, they will reflect back to the ship and be detected by the receiver. The multibeam system then calculates the angle, the time it took for the pulses to travel, the ship’s orientation to the water to determine the depth of the seafloor at that spot. Once the data pulses return and are analyzed by the computer, topography maps of the seafloor can be created. To “ground-truth” the mapping data divers or remotely operated vehicles (ROVs) are used to verify the data collected on board the ship.
|