Error processing SSI file
|
Sonar Technology
Guy Cochrane
Geophysicist, USGS Pacific Science Center
On land, aerial photography and satellite remote sensing provide imagery of the earth surface for geology and habitat science. Unfortunately, these techniques do not apply well to the undersea domain except in very shallow or very clear water. The solution for ocean exploration is the same one used by a variety of marine mammals: sonar.
What is Sonar?
The word "sonar" is an acronym for "sound navigation and ranging." The first patent for an echo-ranging sonar was filed at the British Patent Office by L. F. Richardson, one month after the sinking of the Titanic. The theory behind sonar is that echoes are stronger when sound bounces off hard surfaces or surfaces that are at right angles to the sound source. Marine mammals produce high energy sound waves naturally and interpret the echoes they hear directly. However, because humans are visually oriented creatures, we use specialized electronics to produce sound signals and then convert the echoes to visual images.
History of Sonar
The first working sonar system was designed and built in the United States by R. A. Fessenden in 1914. The Fessenden sonar could detect icebergs up to two miles away, and it was also used for signaling submarines. Sonar systems evolved slowly until World War II, when they came into use for locating enemy submarines. The science of interpreting sound echoes developed along with the technology. After the war, many well-trained sonar scientists left the military and applied their skills in non-military pursuits, including collecting bathymetric data for nautical charts (fathometers), imaging objects and changes in substrate on the sea floor (side-scan sonars), fish finding, sub-sea-floor echo profiling for locating offshore oil and geologic structures, and acoustic marking and tracking of moving objects.
Specialized sonar instruments have been developed and improved continuously. Single beam sonars that map the area directly beneath the ship have evolved into swath sonars that can map far to either side of the ship and produce continuous high-resolution imagery. Modern multibeam sonars simultaneously collect both bathymetric data and bottom sound reflectivity combining the functions of previous swath fathometers and side scan sonars. A combination of recent and older data, from swath fathometers, side-scan sonars, and multibeam sonars, is being employed in the exploration of the West Coast Sanctuaries
Finding Corals
Corals have been found on the sea floor in areas that have hard bottom, are steeply sloping, elevated above areas of sediment accumulation, and are exposed to ocean currents. Bathymetry maps can be used to identify canyons and other features that focus ocean currents. Slope maps can be generated from bathymetry data to identify steep areas. Bottom hardness can be identified on maps of sound reflectivity data. Rugosity (sea floor roughness) maps can be generated from bathymetric data to select areas that are elevated above sediment deposition. These types of maps are valuable to scientists for the planning and selection of areas for exploration of deep sea corals.
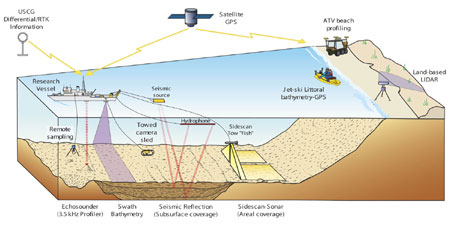 |
| Illustration defining sonar technology. Click here for a larger image. |
|